
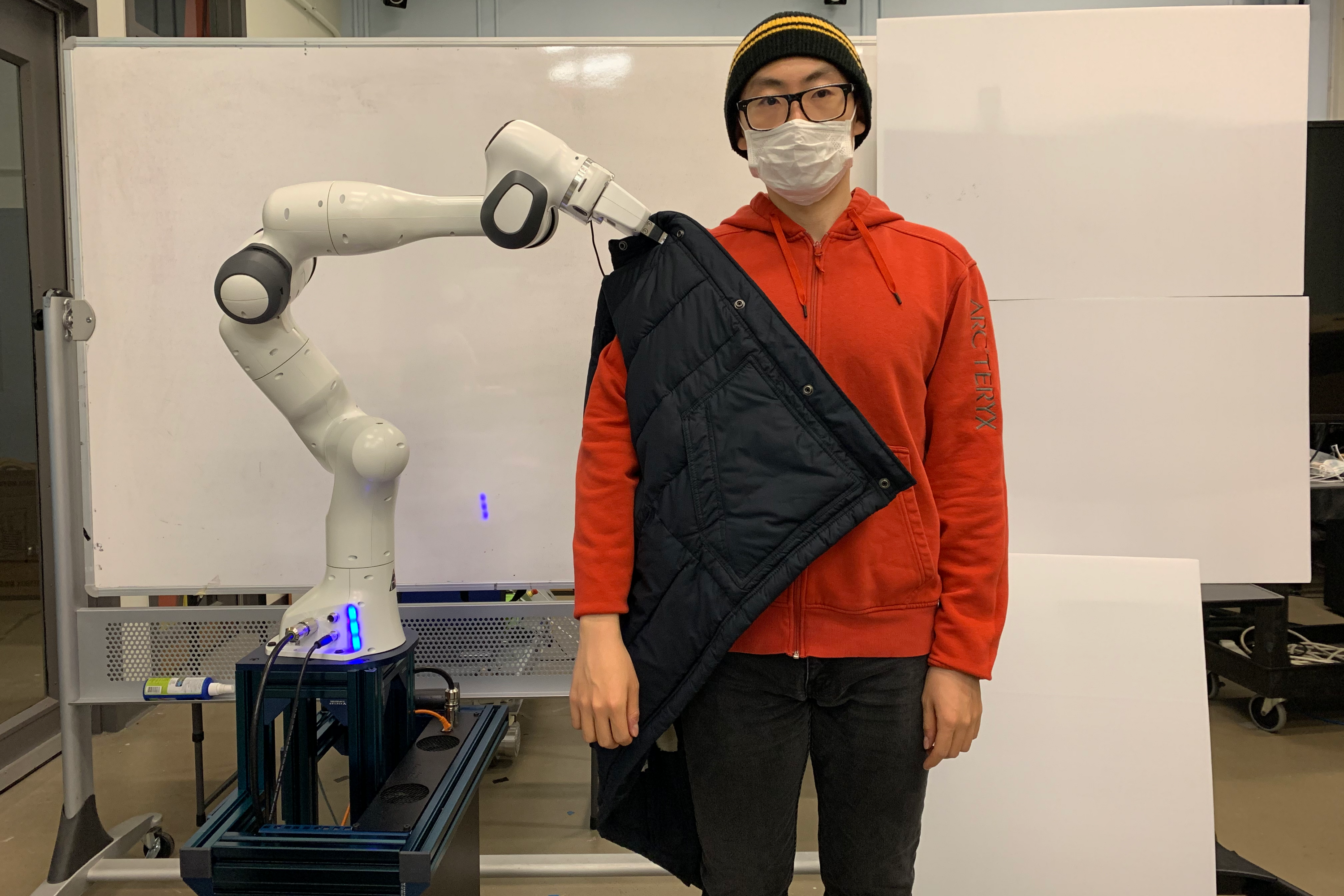
机器人已经能够完成一些任务,比如举起对人类来说太大或不方便搬运的货物。它们特别定制的另一个用途是精确组装物体,如手表,其中包括大量微观部件,其中一些可能非常微小,以至于肉眼无法看到。在不过度影响整体生产力的情况下避免身体伤害的算法的发展是一个主要问题。沈力解释说:“我们的技术可以识别出有效的机器人路径,让机器人对人类产生无害的影响,从而为人类提供安全保障。”麻省理工学院的研究人员展示了一个机械臂通过袖窿用人的右臂抓住背心,然后轻轻地向上拉到肩膀。YouTube上的一段演示视频对比了与传统构造技术相比,这种手臂的速度有多快。
当机器人需要与人接触并合作以安全有效地完成工作时,一切都会变得更具挑战性麻省理工学院航空航天系。该算法包括一个动态框架,用于预测手臂未来的运动方式,每个预测都通过计算在给定时刻施加在织物上的力来进行修正。虽然其他科学家已经做出了这种类型的状态监测预测,但麻省理工学院的研究人员和他们的合作者可以对模糊性建立一个明确的绝对限制,并确保肘部将在规定的框内某处。

在这种情况下,机器人帮助人类穿上夹克,这表明它有能力成为一种有效的工具,为有障碍或行动不便的人提供更多支持。该团队的算法考虑了人类模型中的模糊性,从而给出了对人类健康和安全的假设保证。研究人员没有选择一个专门的默认模型,在这个模型中机器人只知道一种可能的反应,而是为机器提供了对许多不同模型的理解,以便更精确地复制人类对其他人的理解。
最直接的目标是防止人类处于危险的境地。机器人必须时刻保持谨慎,以防止与人发生事故或减轻此类事件的影响。根据李和他的同事的说法,“据我们所知,这是第一次努力建立一个统计安全保证,涉及人-机器人系统的不可预测性的人类机制建模。”如果手臂是伸直的,机器人将沿着一条又直又窄的路径行走;如果手臂弯曲,机器人必须绕着肘部弯曲。他说,树立一个值得信赖的形象至关重要。“如果肘部评估不正确,机器人可能会选择产生不必要的、潜在危险的力量的运动,”斯图莱蒂斯解释说。
根据麻省理工学院的一位研究人员的说法,后一个例子的显著差异是由于“视觉障碍。”“在整个穿衣服过程中,机器人看不到人的手臂。”这反过来又影响了机器人将一件衣服(如长袖衬衫)从手上移到肩膀上所需的努力。为了解决视力障碍的问题,研究人员创造了一种“状态估计算法”,允许人们对肘部在任何给定时间的位置以及手臂是如何被强迫的做出合理准确和一致的广泛假设,无论它是伸直还是弯曲肘部,试图向上,向下或侧向,即使它完全被衣服覆盖。

{kind=link}